|
行ったものですので、間違っても真似しないでください。 |
||
|
|
手 術 現 場 写 真 | 解説記事 |
|
首 分 離 |
 |
まず肉球からの センサコネクタを 外してから、 足首部のネジ2本を 取って足を取り外す |
|
部 分 |
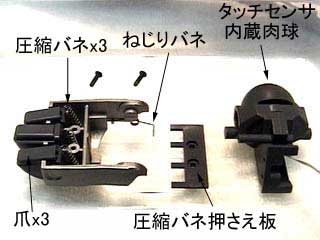 |
保持されてる肉球は |
|
肢 分 解 |
 |
4本を取るとケースが 外れ上肢から分離 いきなりばらばらに なっちゃいます |
| 下
肢 減 速 ギ ヤ |
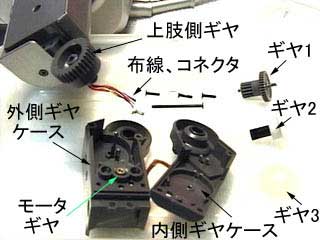 |
モータ部と上肢部 にもギヤがある 減速比約257 モータは φ14(12)*20 VTR用小型DCモータ メーカ不明 |
|
術 無 事 終 了 |
 |
ということで今回は
ここまでで 再組み立て 今回の手術は流血なし傷なし後遺症等全くなしで、手術終了後
|
| (^^v |  |
AIBOくん
御苦労さま でした |
|
括 と 考 察 |
今回の手術で苦労したのが、従来のAV機器に比較して、圧倒的に外側に露出したネジがなく、各部品が精巧なはめ込みで組み立てられているため、いいかげんにひっぱっても部品がはずれないとこ、下手に部品を外そうと破損しそうなため非常に神経を使いました。(^_^;)汗 (一体しかないから、誰か検討用に中古でも提供してくれんかな(^^ゞ) 外装は主に一本のネジといくつかのはめ込みで組み立てられていて、意匠的な問題解決と部品点数削減を図っており、一般AV機器に比較しても最先端の技術をもりこんだ製品です。 また内部のギアケースに関しても、ギヤケース自体はネジ4本で分解できるがギヤやギヤの中心のシャフトはケースで保持しているため、ギヤケースをばらすといきなりギヤとシャフトもバラけてします。、それでも、現在の精密機器の部品精度の限界を追求しているようです。(部品コスト的には当然高くなる) さらに、各部品は、できる限りの軽量化と薄肉化が図られていて、外装に関してはt=1以下の部分もあったり、ひざ関節部分等見た目には強度的に?的なところもありますが、軸受けにはメタルを圧入してあったりして、各部強度計算もぎりぎりのところを狙っているようです。 また、AIBOの動きで気になるモータとギヤの騒音対策ですが、一応モータ出力部分への一段目のギヤは軟性のプラスチック(デルリン)を使ってはいますが、それ以外は普通のプラスチック(ABS等)なのでこの辺は、ギヤケースの防音対策とともに今後の改良課題かと思います。 今回分解する前は、ひざの関節部分にダンパー等を使用しているのかと思っていましたが、ダンパーはなく、普通の平歯車のギヤ列だけでした。また特出すべきは、ひざ関節部分に、電機部品である可変抵抗を挿入してあり、ひざ部分の角度位置をアナログ的に常に検出していることです。これによりバッテリ消費量的には不利ですが、常にモータを微妙に制御しているようです。
ここで、問題点をあげるとすれば、組み立て性の問題があるかと思います。まず部品形状が矩形でないところが多いため、まるで立体パズルを空中で組まなければならないといった感じです。またネジ締め部も部品の保持固定部分がないために、しっかろトルクを掛けられない。このため、締めるのもまた緩めるもの至難のわざです。たぶん工場では専用の固定治具等を用いているとは思いますが、手組で生産が遅れ気味になっているのもわかる気がします。
今回は、ざっとこんなとこですが、次回以降他の部分でも色々な新規な発見があるかと思います。また今回の写真は都合によりビデオからのキャプチャー写真なので解像度的にいまいち不鮮明なのを御容赦ください。 by にぃ@ロボペ研究所
|
|
|
Copyright(C) 1999 Robope Laboratory |